Постановка задачи оценки распределения момента первого достижения
Многие важные задачи анализа систем могут быть сформулированы в терминах момента первого достижения. Поэтому различные оценки распределения этого момента важны в первую очередь с практической точки зрения.
Сформулируем задачу, которая будет решаться в данной главе.
Прочитать остальную часть записи »
Повышение эффективности унимодального поиска за счет дополнительной информации о минимизируемой функции
Без потери общности предположим, что решается задача минимизации унимодальной функции Q (х), определенной на единичном интервале [0, 1], во внутренней точке ξ которого имеется информация о численном значении функции Q (ξ). В этом случае применение процедур сокращения интервала неопределенности позволяет получить после проведения N испытаний апостериорный интервал неопределенности [aN, bN], длина которого определяется следующим выражением:
lN(ξ) = bN — aN = max ((1-ξ)/uN, ξ/uN-1), 0 ≤ ξ ≤ 1/2; (3.61)
Особенности работы локальной сети в режиме файл сервер
Особенности работы локальной сети в режиме файл сервер
Возможность одновременного доступа к общим данным является достаточно хорошим техническим решением для группы пользователей, однако для этого нужно соблюсти некоторые вещи, чтобы некоторая ограниченная группа пользователей могла параллельно иметь доступ и заботилась о целостности данных. Здесь решаются следующие основные общие проблемы:
Прочитать остальную часть записи »
Пример процесс рождения и гибели. Многолинейная система массового обслуживания с относительным приоритетом
Пример 1. Процесс рождения и гибели. Рассмотрим вероятностный процесс, широко применяемый в различных прикладных областях. Это процесс со счетным числом состояний N = {0, 1, 2, …}. В каждом состоянии v∈N процесс проводит случайное время, которое распределено экспоненциально с параметром λ(v), после чего переходит либо в состояние v + 1 (с вероятностью pv), либо в состояние v—1 (с вероятностью qv), q0 = 0, pv + qv = 1. Будем считать, что λ(v) > 0, v ≥ 0, pv > 0, v ≥ 0 и qv > 0, v ≥ 1. Из этих условий следует, что p0 = 1. Величина λ(v)pv трактуется как интенсивность рождения в состоянии v, а λ(v)qv — интенсивность гибели в этом же состоянии. Очевидно, что любая функция V(v), не принимающая бесконечных значений, принадлежит множеству DА. При этом вид оператора А (см. формулу (3.4), где нужно положить vv = 0) следующий:
AV(v) = λ(v) [pvV(v + 1) + qvV(v- 1) — V(v)]. (1)
Метод Фибоначчи
Метод поиска, реализующий процедуру выбора точек испытаний по формулам (3.8)—(3.9) (см. предыдущий пост) коэффициентами tk*, которые вычисляются из выражений (3.37), называется методом Фибоначчи. Это название возникло в связи с тем, что стратегия поиска оптимального решения х* по данному методу, как нетрудно видеть, связана с использованием чисел Фибоначчи (3.29).
Прочитать остальную часть записи »
Достаточные условия регулярности
Объектом изучения в данном посте и далее, если не оговорено противное, является процесс zt, построенный на последовательности необрывающихся процессов zt, n. Напомним, что одним из условий проведенных построений является необрываемость подпроцессов zt, n. В свою очередь достаточным условием для этого является выполнение леммы 2 с заменой Тδ на Tδ, n. Ниже без дополнительных оговорок будет считаться, что все подпроцессы zt, n необрывающиеся. Во всех примерах данной и последующих постов условия леммы 2 выполнены. Это обстоятельство также не будет всякий раз оговариваться.
Прочитать остальную часть записи »
Поиск минимума унимодальной функции путем сокращения интервала неопределенности
Задача минимизации одномерной унимодальной функции Q(х), определенной на интервале [а, b], связана с поиском оптимального решения х*:
Q(x*)= min Q(x). (3.1)
Из свойства унимодальности функции Q (х) следует, что с возрастанием переменной х функция Q (х) строго убывает при х ≤ х* и строго возрастает при х ≥ х*, т. е. унимодальная функция не должна иметь горизонтальных участков («плато»), хотя может быть не дифференцируемой, разрывной, неопределенной в некоторых точках и т. д. В начале поиска положение точки х* на интервале [а, b] неизвестно. Путем проведения в точках рассматриваемого интервала N испытаний требуется локализовать оптимальное решение х* в интервале [aN, bN] меньшей длины, чем исходный. При этом предполагается, что каждое испытание, связанное с вычислением значения функции Q (х), может быть выполнено без ошибки, либо последняя настолько мала, что ею можно пренебречь. В дальнейшем интервал [aN, bN] будем называть апостериорным интервалом неопределенности в отличие от исходного интервала [а, b], называемого априорным интервалом неопределенности.
Прочитать остальную часть записи »
Процесс, построенный на последовательности необрывающихся процессов
Условия леммы 1 достаточны для того, чтобы рассматриваемые процессы были необрывающимися. Однако существуют практически интересные задачи, требующие изучения процессов, у которых функции λ(z) и vv неограничены. Поэтому принципильно важно получить более широкие условия регулярности рассматриваемых процессов. Вместе с тем необходимо напомнить, что построения были проведены в предположении равномерной ограниченности λ(z) и vv (условие (1.3.2)). Поэтому, прежде чем переходить к получению соответствующих результатов, необходимо расширить класс изучаемых процессов.
Прочитать остальную часть записи »
Реализация имитационного моделирования
Имитационная модель задается из совокупности моделей отдельных компонентов системы и связей между ними. Но составление моделей — не самоцель. Модель требуется для реализации машинных экспериментов. Таким образом, после создания модели системы из компонентов надо иметь средства для организации различных экспериментов с ней. Кроме того, необходимо в удобном виде представить результаты эксперимента для их анализа.
Прочитать остальную часть записи »
Определение весовых коэффициентов относительной важности частных критериев оптимальности по матрице экспертных оценок
Для неравноценных частных критериев Qi, i = 1, …, s, значения весовых коэффициентов λi, i = 1, …, s, выбираются в соответствии с важностью критерия (более предпочтительному критерию соответствует большее значение весового коэффициента) таким образом, чтобы выполнялось условие
λi ≥ 0, i = 1, 2, .., s; ∑λi = 1. (2.81)
Свойство регулярности. Необрывающиеся процессы
Вводные замечания
Необходимость изучения свойства регулярности возникает естественным образом при рассмотрении возможных типов поведения динамических (в широком смысле) систем. Оказывается, что при определенных условиях траектории могут за конечное время «уйти в бесконечность» или иметь бесконечное число скачков. Такое поведение обычно рассматривается как нежелательное или невозможное, поскольку в реальных системах уход координат в бесконечность за конечное время требует либо бесконечной мощности, либо бесконечной интенсивности расхода других ресурсов. Кроме того, со свойством регулярности тесно связаны и другие качественные свойства — ограниченность, устойчивость и свойства, определяемые моментами первого достижения и возвращения.
Прочитать остальную часть записи »
Метод последовательных уступок
Идея этого метода заключается в том, что на каждом k-м шаге последовательной оптимизации вводится уступка ΔQk-1, характеризующая допустимое отклонение (k — 1)-го частного критерия от его минимального значения:
Q1(x1*) = min Q1(x); Qk(xk*) = min Qk(x), (2.45)
где
Dk = D∩Dk-1; Dk-1 = {x|Qj(x) ≤ Qj(xj*) + ΔQj, j = 1, 2, …, k-1}.
Выводы к анализам по экономике
Анализ состава и структуры дебиторской задолженности
Вывод: на конец года коэффициент оборачиваемости = 14,41 т.е. 14 раз за год предприятию поступают денежные средства от покупателей за проданную продукцию. При этом период погашения = 24,64 дня. Наблюдается замедление оборачиваемости дебиторской задолженности за год. Период погашения увеличился больше, чем на 2 дня. Доля дебиторской задолженности на конец года уменьшилась незначительно и составила 9% в общем объеме оборотных активов (укладывается до 40%, что является рациональным изменением). Удельный вес дебиторской задолженности в объеме реализации увеличился на 0,68% на конец года, и составил 6,75%, т.е. на 1 рубль выручки приходится приблизительно 6,8 копейки обязательств покупателей. Сомнительная дебиторская задолженность отсутствует.
Прочитать остальную часть записи »
Геометрическая интерпретация уравнений возмущенного движения
Пусть уравнения возмущенного движения имеют вид
dx/dt = F(x), F(0) = 0, x(t0) = x0. (3.5.1)
Определение 5. Производной dV/dt функции V(x) = V(x1, x2, …, xN) в силу уравнений возмущенного движения (1.18) называется ее полная производная по времени, вычисленная в предположении, что величины x1, x2, …, xN удовлетворяют уравнениям (1.18), т.е.
Прочитать остальную часть записи »
Пример многолинейной системы обслуживания с ожиданием
Многолинейная система обслуживания с ожиданием. Дадим теперь пример системы, по конструкции более простой, чем КЛП Гнеденко — Коваленко, но не укладывающейся в эту схему.
Рассмотрим систему массового обслуживания (в другом представлении она была рассмотрена в примере 3), состоящую из N приборов, на которую через независимые одинаково распределенные случайные промежутки времени поступают требования. Обозначим Н(х) функцию распределения этих промежутков. Длительности обслуживания отдельных требований на приборах не зависят от остальных случайных величин, «управляющих» системой, и имеют одну и ту же (для всех приборов и требований) функцию распределения В(х). Будем характеризовать состояние системы вектором z = (v, zv), v = 0, 1, …, где компоненты вектора z имеют следующий смысл: v — число требований, находящихся в системе, zv(1)—время, оставшееся до поступления очередного требования,
zv(j), 1 < j ≤ N ∧ v + 1 — времена, оставшиеся до окончания обслуживании требований, находящихся на приборах.
Прочитать остальную часть записи »
Свертывание векторного критерия оптимальности методом выделения главного критерия
Предположим, что информация о важности частных критериев оптимальности Qi (х), i = 1, 2, …, s задана в виде ряда приоритетов — множества индексов J = (1, 2, …, s), упорядочивающих частные критерии в порядке убывания их важности:
Q1 > Q2 > … > Qs (2.39)
Модель узла связи как КЛП Гнеденко — Коваленко
Модель узла связи как КЛП Гнеденко — Коваленко. Предварим разбор примера кратким описанием системы. Рассмотрим сеть связи, задаваемую некоторым графом (рис. 2).
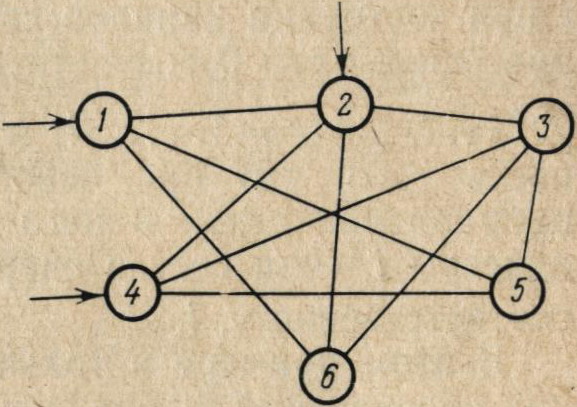
Рис. 2
Узлы графа соответствуют узлам связи, а дуги — направлениям связи. Система работает следующим образом. В не-которые моменты времени на отдельные узлы связи (на рис. 2 они отмечены номерами 1, 2, 4) извне поступают сообщения, подлежащие передаче по сети. Сообщения характеризуются, вообще говоря, рядом признаков: адресом, приоритетом, предельным сроком нахождения в сети и т. д. Узел связи в соответствии с алгоритмом своей работы либо посылает это сообщение в одно из примыкающих к нему направлений связи, либо запоминает его и хранит до ближайшего момента времени, когда появится возможность послать его в сеть. Указанные альтернативы определяются загрузкой сети, наличием свободных каналов связи и пр. Таким образом, в узле связи могут образовываться очереди из сообщений, ждущих своей отправки.
Рассмотрим узел связи вместе с выходящими из него направлениями связи. Пусть работа узла определяется алгоритмом A. Величины, которые характеризуют этот алгоритм, будем отмечать буквой A. Предположим, что рассматриваемый узел связи может посылать сообщения в R направлений связи, R ≥ 1, причем r-е направление (1 ≤ r ≤ R) состоит из mr каналов связи. По каждому из каналов связи одновременно может передаваться не более одного сообщения.
Прочитать остальную часть записи »
Упорядочение векторных критериев оптимальности при помощи обобщенной функции цели
Рассмотрим значения векторного критерия Q = (Q1,…, Qs) в точках хk и хl принадлежащие области компромиссов Dk:
Qk = Q (хk) = (Q1k, Q2k, …, Qsk) и Ql = Q (хl) = (Q1l, Q2l, …, Qsl). (2.11)
Пример многолинейной системы массового обслуживания с относительным приоритетом
Многолинейная система массового обслуживания с относительным приоритетом. Дадим пример описания конкретной системы обслуживания в виде КЛП Гнеденко—Коваленко.
Пусть в систему, состоящую из N обслуживающих приборов, поступают требования двух типов. Требования первого типа назовем приоритетными, а второго — обычными. Обслуживание однотипных требований происходит в порядке их поступления, и процесс обслуживания каждого требования идет без прерывания. В случае, если в момент поступления какого-либо требования имеется хотя бы один свободный прибор, оно немедленно начинает обслуживаться. В противном случае требование ожидает начала обслуживания. Если в момент освобождения прибора в системе находится хотя бы одно требование, то на обслуживание поступает требование наивысшего приоритета из имеющихся в системе. Если в некоторый момент в системе находятся v1 приоритетных и v2 обычных требований, то с интенсивностью Λ1(v1, v2) поступают приоритетные, а с интенсивностью Λ2(v1, v2) —обычные требования. Это означает, что при фиксированных v1 и v2 потоки поступающих приоритетных и обычных требований — независимые пуассоновские с параметрами Λ1 и Λ2 соответственно. В такую модель укладываются, в частности, схемы с бесконечными и конечными источниками требований. Обозначим Λ(v1, v2) = Λ1(v1, v2) + Λ2(v1, v2), pi(v1, v2) = Λi(v1, v2) [Λ(v1, v2)]-1, i = 1, 2. Пусть длительности обслуживания отдельных требований — случайные величины, не зависящие ни от процесса поступления, ни от длительностей обслуживания остальных требований. Обозначим через Bi(x) функции распределения длительностей обслуживания требований i-ro типа, i = 1,2.
Прочитать остальную часть записи »
Двойственные функции. Теорема о суперпозиции двойственных функций. Принцип двойственности
Определение: Двойственной функцией для f(x1, x1,…,xn) называется функция f* = ¬f(¬x1, ¬x2,…,¬xn)
Замечание: (f¬(x1, x2,…,xn))* = (¬f(¬x1, ¬x2,…,¬xn))* = ¬f(¬¬x1, ¬¬x2,…,¬¬xn) = f(x1, x2,…,xn) ⇒ (f*) = f.
Прочитать остальную часть записи »
Четыре причины многокритериальности в задачах
1. Причиной многокритериальности является необходимость обеспечения оптимальности проектируемого устройства при различных условиях его функционирования, т. е. обеспечение экстремальных значений критерия оптимальности при неопределенности условий, в которых приходится работать устройству. При этом неопределенность может иметь либо количественный характер, выраженный с помощью параметра v, что приводит к задаче оптимизации вида
Прочитать остальную часть записи »
Пример 1 — модели сложных систем, описываемые как КЛП
Пример 1. КЛП Гнеденко — Коваленко.
Рассмотрим случайный марковский процесс, служащий моделью широкого класса систем массового обслуживания. Состоянием процесса является вектор z переменной размерности, z = (v, zv (1), …, zv(|v|)), где компонента v (основное состояние) принимает значения из конечного или счетного множества N, a zv(j) > 0, j= 1,…,|v|. В промежутках между скачками zv(j) изменяется с постоянной скоростью vv(j). Скачки у этого процесса бывают двух типов. Скачки первого типа (вследствие непрерывного вмешательства случая) происходят с интенсивностью λ(v), зависящей лишь от v. В этом случае после скачка новое основное состояние μ будет случайным с распределением {pvμ}, ∑pvμ=1, зависящим лишь от прежнего основного состояния. Таким образом, при рассматриваемом скачке размерность вектора z может только увеличиться. Новый вектор дополнительных координат z* при этом составляется из старого вектора z" и случайного не зависящего от предыстории процесса z, положительного вектора ξvμ размерности |μ| — |v|, функция распределения которого Hvμ (х (1), …, х (|μ| — |v|), х (j) > 0, зависит только от v и μ. Именно zμ = (zv, ξμ) = (zv(1), …, zv(|v|), ξvμ (1), …, ξvμ(|μ|— |v|)). После такого скачка координаты вектора zμ вновь изменяются с постоянной скоростью vμ.
Прочитать остальную часть записи »
Классификации топок
По способу сжигания топлива различают топки:
• Со слоевым сжиганием:
— Исторически первый способ
— Изначально было сжигание в неподвижном первом слое. Куски топлива забрасывались на решетку, через которую внизу пропускался воздушный поток. Много раз совершенствовалась.
Прочитать остальную часть записи »
Природа многокритериальности в задачах оптимального проектирования
Наиболее общей математической моделью принятия оптимального решения является задача многокритериальной оптимизации (1.47)— (1.49), в которой требуется найти минимум одновременно по всем компонентам векторного критерия Q = (Q1, Q2, …, Qs). Естественно возникают вопросы: в чем природа такой модели принятия решения и насколько часто она встречается в задачах схемотехнического проектирования электронных схем. Для ответа на них рассмотрим различные классы задач оптимального проектирования и выясним причины, которые приводят к необходимости использовать там векторный критерий оптимальности.
Прочитать остальную часть записи »
Вывод формулы для КЛП (кусочно-линейных марковских процессов)
Установим теперь для КЛП формулу, аналогичную формуле (1.3). Пусть V(z)—некоторая ограниченная функция, такая, что V(v, zv+vvt), рассматриваемая как функция t при zv+vvt∈Гv, непрерывна и обладает непрерывной справа правой производной. Доопределим V(z) на Z* по непрерывности следующим образом: пусть z* = (v, z*v)∈Z*, и пусть последовательность {ti}i≥1 сходится к 0 и обладает тем свойством, что z*v + vvti∈Гv, i≥1; тогда положим V (z*) = lim V (v, z*v + vvti); если же последовательности, обладающей указанным свойством, не существует, то в таких точках z* функцию V доопределим произвольно — такая точка z* недостижима. Обозначим класс полученных функций DА и будем предполагать, что V∈DА.
Прочитать остальную часть записи »
Оперативная память СУБД Oracle
Основная области памяти СУБД Oracle:
• Область программного кода. Это ПО, которое предназначено для работы с самой БД.
• SGA (System Global Area) – Системная глобальная область. Это область считается основной в СУБД Oracle. Она хранит данные, используемые совместно всеми процессами в экземпляре. Формально можно делить ее на части: буферный кеш – содержит записи БД, ожидающие перезаписи на диск или доступные для чтения (считанные), буфер журнала обновления, который хранит копии транзакций, которые тоже ждут записи на диск
Прочитать остальную часть записи »
Условия Куна-Таккера для условной оптимизации
Условия оптимальности для задачи выпуклого программирования (1.30) называются условиями Куна — Таккера и эквивалентны утверждению, что при движении в любом возможном направлении S из точки х* критерий оптимальности Q(x) не может быть уменьшен. Геометрическая интерпретация условий Куна—Таккера имеет следующий смысл: в точке х*∈D , являющейся оптимальным решением задачи выпуклого программирования (1.30), градиент выпуклой функции Q (х) является линейной комбинацией градиентов активных ограничений gi (х) = bi, i∈J—, взятых с положительными коэффициентами ui* > 0. Условие (1.78) называется условием дополняющей нежесткости и означает, что если некоторое из. неравенств является в точке х*∈D неактивным ограничением, то оно должно входить в условия Куна—Таккера с множителем ui*, равным нулю, а для активных ограничений множители ui* должны быть положительными.
Прочитать остальную часть записи »
Кусочно-линейные марковские процессы с непрерывным временем
Один из способов анализа немарковского процесса состоит в расширении пространства его состояний, для того, чтобы включить в понятие состояния всю ту информацию о предыстории исходного процесса, которой полностью определяется его будущее течение. Иногда такая информация может быть задана в виде конечномерного вектора. Именно такому способу анализа немарковских процессов и обязана своим возникновением схема кусочно-линейных марковских процессов (КЛП).
Прочитать остальную часть записи »
Z — преобразование
Для описания и анализа дискретных систем, решения разностных и рекуррентных уравнений используется Z -преобразование.
Z-преобразование применяют к сигналу, квантованному по времени (к дискретным значениям непрерывного сигнала).
Z -преобразование определяется как сумма отрицательных степеней комплексной переменной z с помощью соотношения:
 (1.18)
(1.18)Прочитать остальную часть записи »
Условия оптимальности для задачи условной оптимизации
Сформулируем теперь условия оптимальности для задачи условной оптимизации (1.32).
Предположим, что ограничения gi (х) являются непрерывными дифференцируемыми функциями и уравнения связи gi(х) =bi, i = 1,2,…, m < n, могут быть разрешены относительно части переменных (не нарушая общности будем считать, что зависимыми переменными являются m Прочитать остальную часть записи »