Уравнения возмущенного движения
Чтобы вывести уравнения возмущенного движения введем новые переменные, представляющие собой отклонения (или вариации) x1, x1•=x2 возмущенного движения q(t), q•(t) (1.5) от невозмущенного ξ(t), ξ•(t) (1.3), а именно:
q(t) = ξ(t) + x1, q•(t) = ξ•(t) + x1•. (1.15)
Подставим замену переменных (1.15) в уравнения движения (1.14). В результате получим уравнения движения для возмущений x1:
A(ξ(t)+x1)(ξ•• + x1••) + b(ξ•+x1, ξ•+x1•) + c(ξ+x1) = QН ξ+x1,ξ•+x1•) (1.16)
Определение. Дифференциальные уравнения движения (1.16), получающиеся из исходных уравнений (1.2) путем замены (1.15), называются уравнениями возмущенного движения.
Уравнения возмущенного движения (1.16) можно записать в форме Коши (1.17), если обозначить x1• = x2, x1(t0) = x10 x2• = f(x1, x2), x2(t0) = x20. (1.17)
Здесь f(x1, x2) = A-1[QН(ξ+x1,ξ•+x2) — A(ξ+x1)ξ•• — b(ξ•+x1, ξ•+x2) — c(ξ+x1)].
Уравнения возмущенного движения в форме Коши (1.17) запишем для удобства дальнейшего изложения в виде
dx/dt = F(x), x (t0) = x0. (1.18)
Здесь x = (x1T, x2T)T= (x1,…, x2n)T — 2n-мерный вектор-столбец отклонений возмущенного движения от невозмущенного движения, F(x) = (x2T, fT)T — вектор-столбец правых частей уравнений движения. Будем считать, что правые части F(x) не зависят от времени. Система дифференциальных уравнений (1.18) имеет размерность N = 2n.
Заметим, что F(0) = 0, поскольку f(0, 0) = 0, поэтому уравнения (1.18) имеют нулевое решение x(t) = 0. (1.19)
Нулевое решение (1.19) описывает невозмущенное движение уравнений движения (1.18). Решение (1.19) соответствует невозмущенному движению ξ(t), ξ•(t) (1.3) исходных уравнений (1.1).
Таким образом, переход к отклонениям x1, x2 (замена переменных) (1.15) позволяет свести задачу исследования устойчивости невозмущенного движения ξ(t), ξ•(t) системы (1.1) к задаче исследования устойчивости нулевого положения равновесия x = 0 системы (1.18), записанной в форме Коши.
Замечание: Уравнения в форме Коши используются для описания поведения не только механических систем, но также электромеханических, биологических, химических, экономических и т.д. Геометрическая интерпретация уравнений возмущенного движения (1.18)
Уравнения возмущенного движения (1.18) описывают движение изображающей точки М с координатами x1,…, xN вдоль некоторой траектории γ (рис.1.6).
При этом скорость U = (U1, U2,…, UN)T движения изображающей точки М,
направленная по касательной к этой траектории, определяется правыми частями уравнений (1.18)
U1 = F1, U2 = F2, … , UN = FN. (1.20)
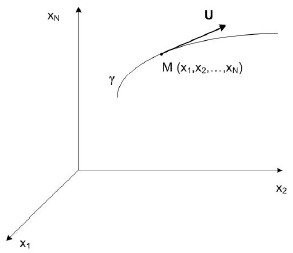
Рис.1.6 Геометрическая интерпретация уравнений возмущенного движения (1.18)
Замечание. При решении конкретных задач уравнения возмущенного движения необязательно приводить к форме Коши (1.18). Можно пользоваться уравнениями возмущенного движения (1.16) в форме Лагранжа II рода.
Сформулируем определения устойчивости в терминах вектора отклонений x=(x1,…,xN)T для уравнений возмущенного движения (1.18) в форме Коши.
Наряду с невозмущенным движением x = 0 (1.19), удовлетворяющим нулевым начальным условиям, будем рассматривать возмущенные движения системы (1.18)
x = x (t), (1.21) удовлетворяющие начальным условиям
x(t0) = x0. (1.22)
Здесь величины x0 — некоторые вещественные постоянные, представляющие начальные возмущения.
Определение (устойчивости по Ляпунову) Невозмущенное движение x=0 системы (1.19) называется устойчивым по Ляпунову относительно величин x=(x1,…,xN)T, если для любого числа ε > 0, сколь бы мало оно не было, существует число δ(ε,t0)>0 такое, что при начальных возмущениях x(t0), удовлетворяющих условию
|| x0|| < δ, (1.23) и при всех t ≥ t0 будет выполняться неравенство || x(t) || < ε. (1.24) В противном случае невозмущенное движение называется неустойчивым.
Здесь ||x(t)|| = √xi2
Геометрическая интерпретация определения устойчивости по Ляпунову в пространстве состояний x1,…,xN.
На рис.1.7 представлена геометрическая интерпретация определения устойчивости по Ляпунову в пространстве x1,…,xN. Начав в начальный момент времени t=t0 движение из точки М0, лежащей в Bδ-окрестности начала координат, изображающая точка М в случае устойчивости нулевого положения равновесия (начала координат) при t ≥ t0 не выйдет из Bε-окрестности начала координат.
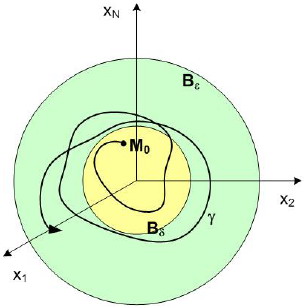
Рис.1.7 Геометрическая интерпретация определения устойчивости по Ляпунову