Постановка задачи об устойчивости движения. Определение устойчивости по Ляпунову
Рассмотрим движение механической системы, имеющей n степеней свободы, на которую наложены голономные стационарные удерживающие связи. Уравнения движения системы можно записать в форме уравнений Лагранжа II рода
 (1.1)
(1.1)Здесь T =1/2q•TA(q)q•, П = П(q) — кинетическая и потенциальная энергия системы, q = (q1, …, qn)T, q• = (q1•, …, qn•)T — n-мерные векторы-столбцы ее обобщенных координат qi и скоростей
qi•, QН = QН(q,q•) = (QН1, …, QНn)T — вектор-столбец обобщенных неконсервативных сил.
После дифференцирования уравнения (1.1) можно записать в виде
A(q)q•• + b(q,q•)+ c(q) = QН(q,q•), (1.2)
где b(q,q•), c(q) – некоторые нелинейные вектор-функции, которые получаются после дифференцирования кинетической и потенциальной энергий.
Пусть уравнения (1.1) и, соответственно, уравнения (1.2) имеют частное решение
qp = ξ(t), qp• = ξ•(t) , (1.3)
удовлетворяющее начальным условиям
qp(t0) = ξ(t0) = ξ0, qp•(t0) = ξ•(t0) =ξ0•. (1.4)
Если решение (1.3) подставить в уравнения (1.2), то получим тождество
A(ξ)ξ•• + b(ξ,ξ•)+ c(ξ) = QН(ξ,ξ•).
Решение (1.3) — (1.4) описывает некоторое движение системы (положение равновесия, стационарное движение, программное движение и т.д.), которое нас интересует и которое
мы хотим исследовать.
Сделаем постановку задачи об исследовании устойчивости движения (1.3) — (1.4).
Следуя А.М. Ляпунову введем следующие определения.
Определение 1.1. Движение (1.3) — (1.4) системы (1.1), устойчивость которого исследуется, называется невозмущенным движением.
Примеры невозмущенных движений: нижнее или верхнее положение маятника, движение спутника по заданной круговой орбите, вращение ротора с постоянной угловой скоростью, движение схвата манипулятора или движение мобильного робота по заданной траектории с заданной скоростью и т.д.
Для исследования устойчивости невозмущенное движение (1.3) — (1.4) необходимо сравнить с другими движениями (возмущенными) системы (1.1), которые запишем в виде
q = q (t), q• = q•(t), (1.5)
существующими у системы (1.1) при тех же обобщенных силах Q, но удовлетворяющими другим начальным условиям, которые можно записать в виде
q(t0) = ξ0+ x10, q•(t0) = ξ0•+ x20. (1.6)
Величины x10, x20 — некоторые вещественные постоянные, которые называются начальными возмущениями (их еще называют мгновенными возмущениями).
Будем считать, что начальные возмущения x10, x20 численно достаточно малы.
Определение 1.2. Движения (1.5) — (1.6) системы (1.1), с которыми сравнивается невозмущенное движение, называются возмущенными движениями.
Возмущенное движение полностью определяется постоянными величинами начальных возмущений x10, x20, поскольку действующие в системе (1.1) силы предполагаются теми же самыми, что и для невозмущенного движения.
Примеры возмущенных движений: движения маятника после его отклонения от нижнего или верхнего положений равновесий; движения спутника по орбитам, незначительно отличающимся от заданной круговой, или движения спутника со скоростями, несколько отличающимися от заданной орбитальной скорости по величине и направлению; движения схвата манипулятора по траектории, отличающейся от заданной, со скоростями, отличающимися от заданных и т.д.
Интуитивно ясно, что, если любое возмущенное движение, близкое к невозмущенному движению в начальный момент времени, будет оставаться близким к нему и в остальные моменты времени, то невозмущенное движение можно считать устойчивым.
Если же «расстояние» от возмущенного движения до невозмущенного движения с течением времени будет увеличиваться и станет не малой величиной, то невозмущенное движение можно считать неустойчивым.
Введем точное определение устойчивости по Ляпунову, которое принято за основное в различных областях науки и техники.
Определение 1.3 (устойчивости по Ляпунову) Невозмущенное движение qp=ξ(t),
qp•=ξ•(t) системы (1.1) называется устойчивым по Ляпунову относительно величин q = (q1,…, qn)T, q• = (q1•, …, qn•)T, если для любых чисел ε1, ε2 > 0, сколь бы малы они ни были,
существуют числа δ1, δ2 > 0, зависящие от ε1, ε2 и t0, такие, что для всех решений q(t), q•(t) уравнений (1.1), начальные условия которых q(t0), q•(t0) удовлетворяют неравенствам
||q(t0) — ξ0|| < δ1, ||q•(t0) — ξ0•|| < δ2, (1.7) при всех t ≥ t0 будут выполняться неравенства ||q(t) — ξ(t)|| < ε1, ||q•(t) — ξ•(t)|| < ε2. (1.8)
Здесь ||q(t) — ξ(t)|| — евклидова норма вектора x1(t), характеризующая расстояние между возмущенным и невозмущенным движениями системы.
Геометрическая интерпретация определения устойчивости по Ляпунову в фазовом пространстве q1,…, qn , q1•,…, qn•
На рис.1.2 представлена геометрическая интерпретация определения устойчивости по Ляпунову на фазовой плоскости q, q• для случая системы с одной степенью свободы (n=1). Начав при t=t0 движение из точки М0(q(t0), q•(t0)), лежащей в Bδ-окрестности начальной точки ξ0, ξ•0 невозмущенного движения ξ(t), ξ•(t), где Bδ: |q(t0) — ξ0| < δ1, |q•(t0) — ξ•0| < δ2, изображающая точка М в случае устойчивости невозмущенного движения ξ(t), ξ•(t) при t ≥ t0 не выйдет из Bε-окрестности данного невозмущенного движения, где Bε: |q(t) — ξ(t)|<ε1,
|q•(t)-ξ•(t)| < ε2.
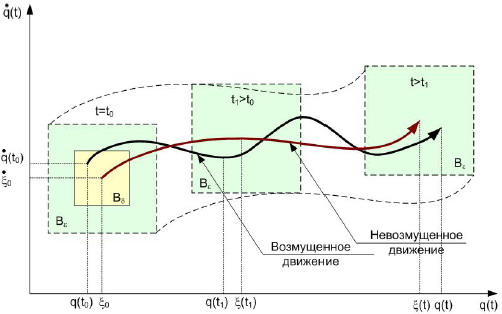
Рис.1.2 Геометрическая интерпретация определения устойчивости по Ляпунову на фазовой плоскости