Математические модели принятия решений
Если в допустимой области D изменения управляемых параметров имеется только одно значение вектора х, то проблемы принятия решения не возникает. В тех же случаях, когда работоспособный вариант проектируемого устройства не единственен, для сравнения нескольких вариантов и выбора среди них наилучшего (в некотором смысле) необходимо ввести критерий оптимальности (функцию цели, критерий эффективности) Q (х), экстремальное значение (максимум или минимум) которого численным образом характеризует свойство одного из наиболее важных технико-экономических показателей проектируемого устройства.
Этот критерий, показывающий относительное предпочтение одного варианта по отношению к другим, определяет цель проектирования и вместе со списком управляемых параметров х и описанием допустимой области D образует математическую модель принятия решений в задаче оптимального проектирования:
min Q(x). (1.24)
Выражение (1.24) является сокращенной записью следующей обобщенной модели принятия оптимального решения:
найти значения управляемых параметров х = (x1, х2, …, хn), обеспечивающих минимальное значение критерия оптимальности
Q = Q (x1, х2, …, хn), (1.25)
при выполнении условий работоспособности проектируемого устройства
gi (x1, х2, …, хn) ≥ 0, i = 1, 2, …, n; (1.26)
xj— ≤ xj ≤ xj+, j = 1, 2, …, n. (1.27)
Таким образом, решение задачи оптимального проектирования сводится к выбору управляемых параметров х, принадлежащих допустимой области D и обеспечивающих экстремальное значение критерия оптимальности Q (х). В дальнейшем задачу (1.25)—(1.27) будем называть задачей параметрической оптимизации (задачей оптимального проектирования). Оптимальным решением этой задачи является вектор х*, удовлетворяющий системе неравенств (1.26)—(1.27) и обеспечивающий минимальное значение критерия оптимальности (1.25).
В зависимости от числа n управляемых параметров, структуры допустимой области D и вида критерия оптимальности Q (х) задача оптимального проектирования приводится к различным классам математических моделей принятия оптимального решения в рамках введенной модели (1.24).
В тех случаях, когда число управляемых параметров х больше одного (n ≥ 2), задача параметрической оптимизации называется многопараметрической задачей оптимизации, при n = 1 — одномерной задачей оптимизации. В одномерном случае осуществляется поиск минимума произвольной кривой Q (х) на некотором интервале |х—, х+|:
min Q(x),
В многомерном случае решение задачи параметрической оптимизации сводится к поиску минимума функции Q (х), определенной в многомерном параллелепипеде (1 -14);
min Q(x). (1 28)
В зависимости от вида критерия оптимальности Q (х) оптимальное решение х* может быть либо точкой локального минимума, либо точкой глобального минимума.
Вектор х* называется точкой локального (относительного) минимума, если для всех точек х, принадлежащих ε-окрестности d(x*, ε) этой точки, функция Q (х) не принимает меньшего значения:
Q (х*) ≤ Q (х) для всех х∈d (х*, ε).
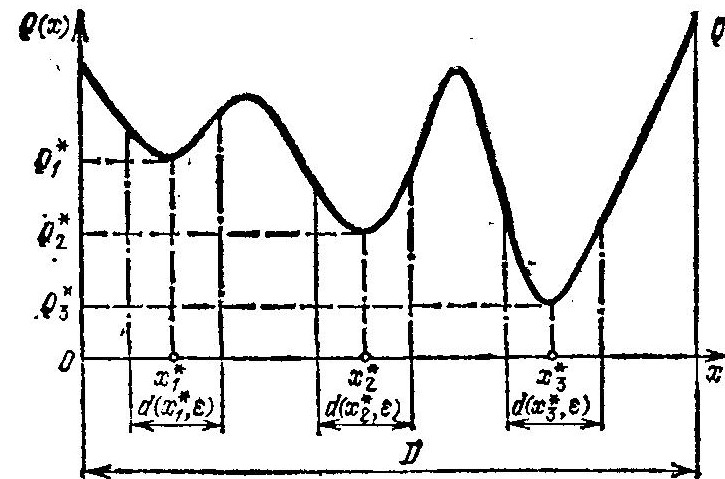
Рис. 1.6. Произвольная кривая с двумя локальными (х1*, х2*) и одним глобальным (х3*) минимумом
Рис. 1.7. Одномерные унимодальные функции
Вектор х* является точкой глобального (абсолютного) минимума, если ни в одной другой точке допустимой области D функция Q(x) не принимает меньшего значения:
Q (х*) ≤ Q (х) для всех х ∈ D.
Таким образом, глобальный минимум — это наименьший из всех локальных минимумов. На рис 1.6 показаны точки локальных (х1*, х2*) и глобального (х3*) минимумов для произвольной кривой Q (х).
Задача параметрической оптимизации, в которой критерии оптимальности Q (х) имеет в области D единственный локальный минимум называется одноэквтремальной (унимодальной) задачей оптимизации. Простейшими из унимолальных функций являются выпуклые функции (рис 1.7, а). Геометрически свойство выпуклости означает, что функция Q (х) расположена ниже любой прямой, соединяющей две точки на ее поверхности:
Q (αx1 + (1 — α) x2) ≤ αQ (x1) + (1 — α) Q (х2) для любых x1, x1∈D и 0 ≤ α ≤ 1.
На рис. 1.7 приведены примеры унимодальных одномерных функций.
Задача параметрической оптимизации, в которой критерий оптимальности Q (х) имеет несколько локальных минимумов, называется многоэкстремальной задачей оптимизации.
При отсутствии ограничений на параметры х и характеристики φi (х) задача параметрической оптимизации сводится к поиску минимума функции Q (х), определенной в n-мерном евклидовом пространстве:
min Q(x). (1.29)
Задача (1.29) называется задачей оптимизации без ограничений (задачей безусловной минимизации).
При наличии нелинейных ограничений, связывающих управляемые параметры х между собой, задача параметрической оптимизации называется задачей нелинейного программирования (задачей поиска минимума при наличии ограничений):
min Q(x), (1.30)
где D = {x|gi (x) ≥ 0, i = 1. 2, …. m}.
В некоторых случаях задачу (1.30) можно свести к задаче безусловной минимизации вида:
min Q*(z), (1.31)
где Q*(z) = Q (х) = Q (f1 (z), f2 (z), …, fn (z)); xi = fi (zi) — функция преобразования i-й переменной (в частном случае функция преобразования fi(z) может иметь вид: xi =fi (zi)); z — вектор новых варьируемых переменных, компоненты которого удовлетворяют условию: -∞ ≤ zi ≤ ∞, j = 1, 2,…, s ≤ n. (Число новых переменных zi равно s = (n — k), где n — общее число управляемых параметров х, a k — число ограничений типа равенств.) Для того чтобы оптимальное решение z* задачи (1.31) было эквивалентно оптимальному решению х* исходной задачи (1.30), необходимо, чтобы функции преобразования удовлетворяли следующим двум условиям:
для каждого х ∈ D существует по крайней мере один действительный вектор z такой, что xi = fi (z), i = 1, 2,…, n;
для любых действительных чисел -∞ ≤ zi ≤ ∞, i=1,2, …s, вектор х = (f1 (z), f2 (z), …, fn (z)) принадлежит множеству D.
Задача параметрической оптимизации с ограничениями типа линейных неравенств
min Q(x), где Dx = {x|xj— ≤ xj ≤ xj+, j = 1, 2,…, n}, сводится к задаче безусловной оптимизации (1.31) при помощи функций преобразования вида:
xj = xj— + (xj+ — xj—) sin2 zj = 1, 2,…, n.