Допустимая область изменения управляемых параметров х
Множество D называется допустимой областью изменения управляемых параметров х. Любой вектор х, принадлежащий допустимой области D (х∈D), определяет работоспособный (в смысле удовлетворения техническим требованиям, заданным системой неравенств (1.7)—(1.8)), вариант проектируемого устройства. По своей структуре допустимая область D может оказаться выпуклым или невыпуклым множеством, которое, в свою очередь, может быть односвязной или многосвязной областью.
Множество точек, образующих область D, называется выпуклым, если для любой пары точек х1, х2 ∈ D отрезок прямой линия, соединяющий их (х = αх1 + (1 — α) х2, 0 ≤ α ≤ 1), также полностью принадлежит этому множеству. (На рис. 1.1 приведены примеры выпуклого и невыпуклого множеств управляемых параметров х1 и х2.)
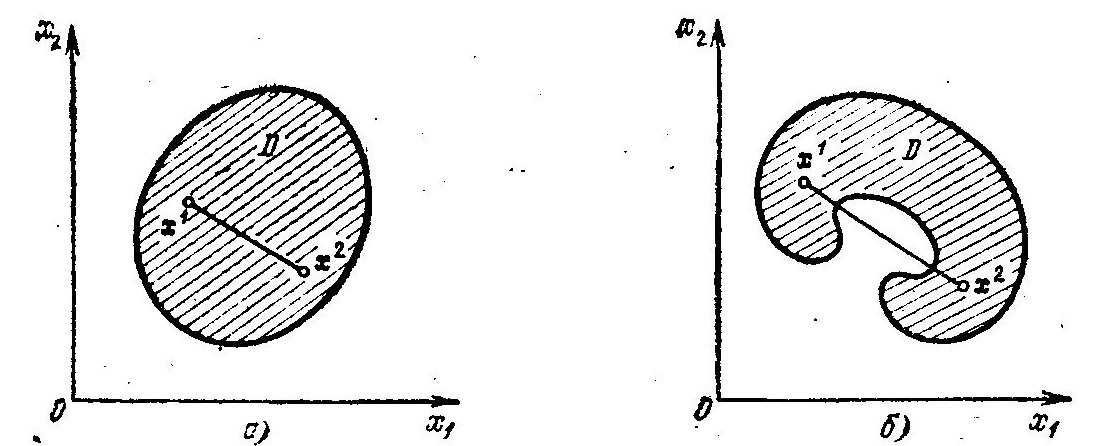
Рис. 1.1. Выпуклое (а) и невыпуклое (б) множество D управляемых параметров x1 и x2
Допустимая область D называется многосвязной, если она состоит из нескольких отдельных частей (выпуклых или невыпуклых), которые не Связаны между собой. В противном случае допустимая область D называется односвязной. На рис. 1.2 приведены примеры односвязной области D.
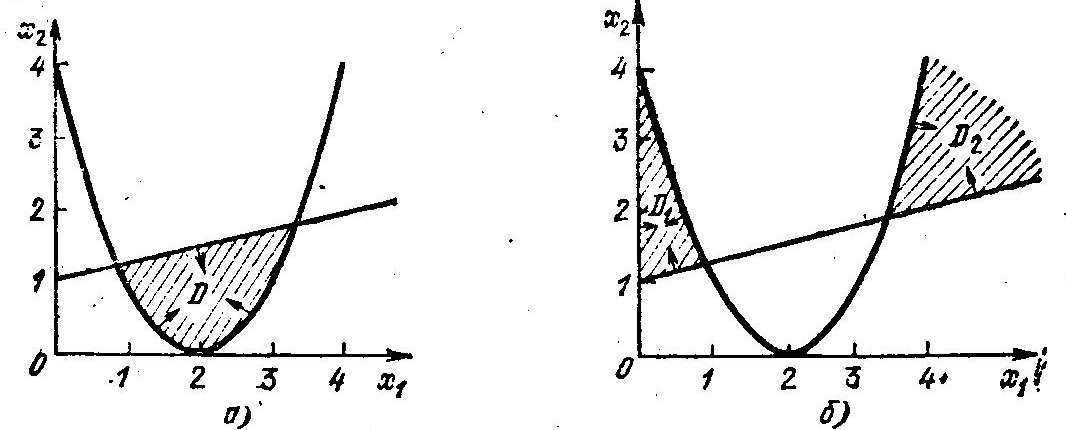
Рис. 1.2. Односвязная D (а) и многосвязная D1 и D2 (б) допустимая область управляемых параметров x1 и х2
D = {x|g1 (х) = 0,25х1 — х2 + 1 ≥ 0, g2 (х) = х2 — х12 + 4x1 — 4 ≥ 0, х1 ≥ 0, х2 ≥ 0}
и многосвязной области D*, состоящей из двух частей D1 и D2:
D* = D1∪D2 = {х|g1(х) = — 0,25x1 + х2 — 1 ≥ 0, g2(х) = — x2 + х12 — 4x1 + 4 ≥ 0, х1 ≥ 0, х2 ≥ 0}.
Одной из особенностей задач оптимального проектирования электронных схем является то, что в систему ограничений (1.9) могут входить характеристики, которые непрерывно зависят от некоторого параметра v, заданного на интервале [v—, v+]. Таким параметром может быть частота, время, температура и т. п. Например, при проектировании транзисторных усилителей, пассивных и активных фильтров технические требования к частотным характеристикам (коэффициенту передачи по напряжению, входному и выходному импедансу, рабочему затуханию и т. д.) связаны с выполнением условий, чтобы в полосе пропускания Еп частотная характеристика φ(х, ω) лежала в заданных пределах (φ0—, φ0+), а в полосе задерживания Ез была не меньше заданного значения φ1— (рис. 1.3):
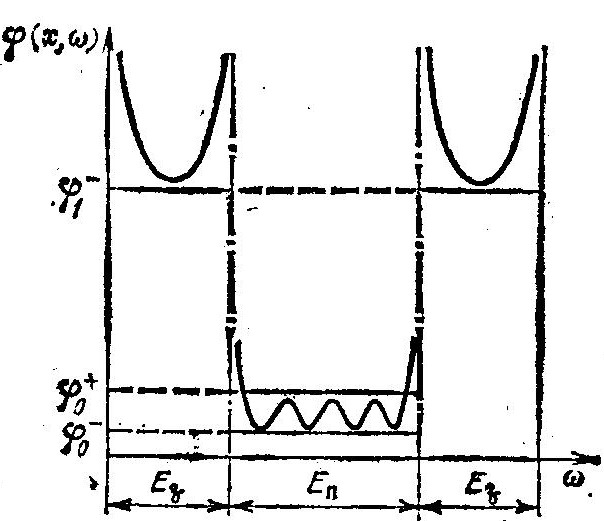
Рис. 1.3. Спецификация, отражающая требования к частной характеристике φ (х, ω) в полосе задерживания Ез и полосе пропускания Еп
φ0— ≤ φ(х, ω) ≤ φ0+, для всех ω∈Еп (1.16)
φ0— ≤ φ(х, ω), для всех ω∈Ез. (1.17)
Аналогичные ограничения возникают при постановке задачи оптимального проектирования электронных схем с учетом старения элементов, т. е. с учетом постепенного и непрерывного изменения параметров компонент схемы со временем:
xj = fj(xj0, t), j= 1, 2,…, n, (1.18)
где xj0 — значение j-го параметра компоненты схемы в начальный момент времени.
Зависимости (1.18) могут быть как линейными, так и нелинейными функциями от времени t. Однако в силу нелинейной зависимости характеристик φi (х) от управляемых параметров х, выражения
φi(х) = φi (f1(x10 t), f2 (x20, t), …, fn (xn0, t) = φi * (хo, t)
по параметру t будут иметь немонотонный характер. Для обеспечения работоспособности проектируемого устройства в течение времени гарантийной наработки Т характеристики φi * (хo, t) должны находиться в пределах норм технических требований (φi—, φi+):
φi—≤ φi* (xo, t)≤φi+, для всех t ∈[t0, Т].
Таким образом, при решении задач оптимального проектирования электронных схем приходится рассматривать ограничения, которые связаны с выполнением условия
g(x, v)≥0, для всех v∈[v—, v+] (1.19)
Переход от ограничений типа (1.19) к ограничениям (1.9), не зависящим от параметра у, можно осуществить либо при помощи сеточного метода, либо используя принцип гарантированного результата.