Имитационное моделирование комбинированных (непрерывно-дискретных) систем
На практике специалисты сталкиваются с ситуацией, когда динамическая система имеет сложный характер и не может быть описана одним, единым математическим формализмом, когда отдельные ее компоненты имеют различную физическую природу и характер процессов в них, т.е. процессы в таких системах описываются различным математическим аппаратом. Ярким примером таких систем являются АСУ ТП в энергетике, в химической промышленности, в металлургии и в других отраслях. Современные АСУ ТП включают ЭВМ, цифровые регуляторы с программной реализацией алгоритмов управления. Такие системы требуют применения как аппарата непрерывной, так и дискретной математики.
Рассмотрим управление, например, химическим процессом. Представим упрощенную схему АСУ ТП подобного процесса (рисунок ниже).
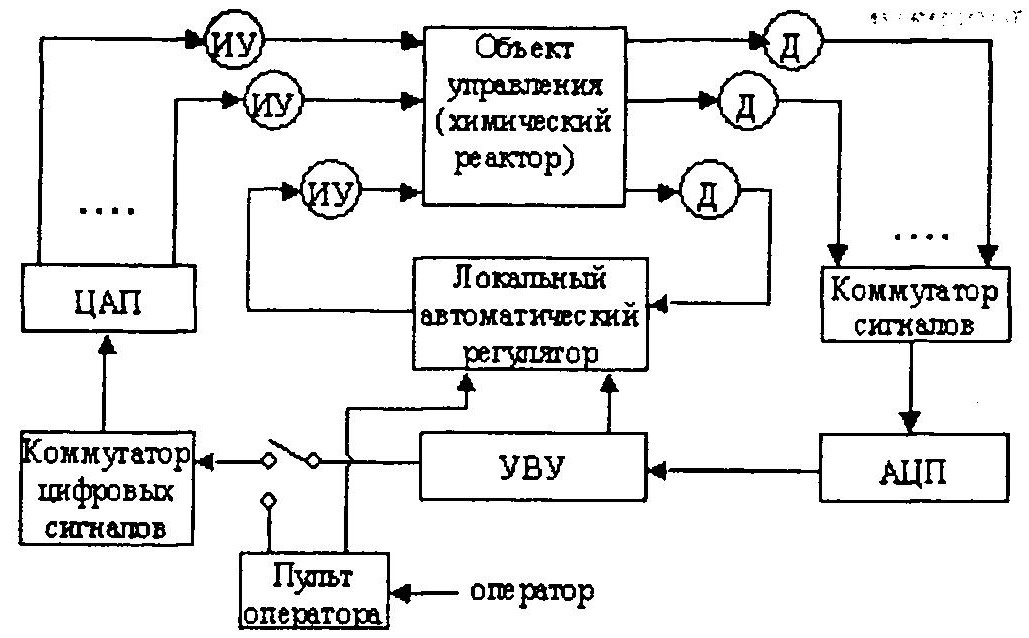
Кроме объекта управления АСУ ТП включает:
• локальные регуляторы непрерывного действия;
• УВУ — управляющее вычислительное устройство дискретного действия;
• каналы связи (много входов — много выходов).
Каналы связи подключаются по очереди и, возможно, с приоритетами, что требует применения для их описания теории массового обслуживания. Ясно, что модель такой системы будет неоднородной, так как она включает компоненты непрерывно-дискретного характера. Модель должна отражать взаимодействие непрерывных и дискретных компонент.
При обзоре языков моделирования таких комбинированных систем была дана их краткая характеристика с указанием недостатков. Большинство из них строилось на основе создания специальной системы программирования, на основе расширения языков высокого уровня. При этом сохраняются все трудности применения универсальных языков программирования. Примером системы с таким языком является программный комплекс НЕДИС. Язык НЕДИС представляет собой расширение алгоритмического языка высокого уровня, что требует от пользователя высокой программистской подготовки.
Все это привело к идее распространения блочного подхода (как в МАССе) к моделированию дискретных процессов. Особенно эффективным является блочный подход, когда дискретная часть событийного характера. Ярким примером событийных систем являются системы массового обслуживания. Упомянутый ранее пакет программ МИКС реализует моделирование комбинированных систем.
Функционирование систем с дискретными событиями можно представить себе как последовательность событий, в промежутках между которыми состояние системы не изменяется. В промежутках между последовательными событиями непрерывно-дискретная система ведет себя как непрерывная. Каждая смена состояний связана с изменениями параметров системы, ее структуры, алгоритма работы и т.п. Событие — мгновенное изменение состояния системы.
Представим суть событийной модели в виде следующей блок-схемы (рисунок ниже).
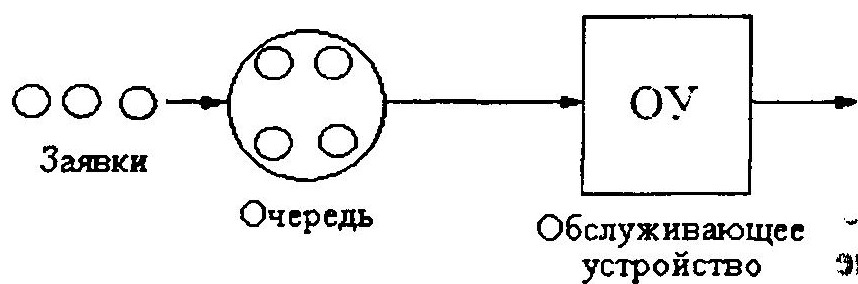
Эта блок-схема справедлива для обычного магазина, класса ЭВМ, для технологического участка и т.п.
В качестве событий здесь можно рассматривать:
• приход или поступление заявки, детали, покупателя;
• начало обслуживания;
• конец обслуживания.
Дискретная модель может быть составлена из блоков, характеризующих состояния объектов в определенные моменты времени. В языке МИКС для этой цели предлагается к блокам МАСС добавить пять новых блоков, представленных на рисунке ниже:
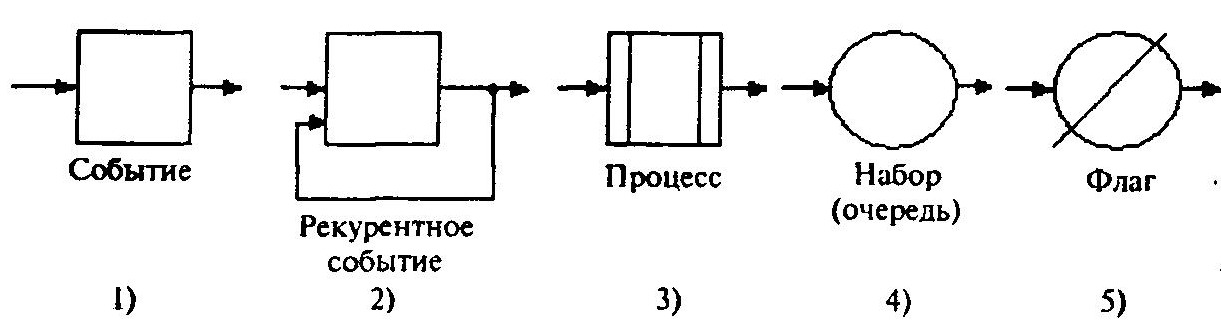
1) действие, которое не имеет длительности, обеспечивает скачкообразное изменение состояния системы в момент их поступления, инициализации событий могут быть вызваны как изменениями в непрерывной части, так и в дискретной части модели. При наступлении событий могут изменяться состояния (флажков, наборов);
2) события, которые повторяются через некоторый промежуток времени (детерминированный или стохастический, случайный);
3) действие, которое происходит в течение некоторого промежутка времени. Начало и конец процесса можно рассматривать как событие.
Это активные блоки — они осуществляют изменение модели;
4) упорядоченный набор данных для хранения объектов моделируемой системы. Здесь может быть использованы разные методы упорядочения входящих в них элементов (первый пришел — первый ушел, приоритетное упорядочение);
5) это ничто иное как счетчик. Его удобно использовать как индикатор состояния других устройств (1 — занято, 0 — свободно) и, следовательно, как условие инициализации процессов и событий, для которых они являются входными блоками.
Последние два блока являются пассивными — они сами подвергаются изменениям.
В качестве примера представим модель дисплейного класса — терминальной системы коллективного пользования (рисунок ниже).

Центральный процессор обрабатывает одну задачу. Через какой-то интервал времени, в общем случайный, появляются пользователи — INPUT.
При наличии свободного места (это определяется состоянием флага 4) занимается — TERM. После этого пользователь приступает к подготовке задачи — WRITE. Если свободного места нет (флаг 4 — положение 1), он вынужден встать в очередь 2. Готовые к решению задачи встают в очередь 3 на обработку центральным процессором (CPU). Флаг 5 указывает на состояние процессора. Пользователь, получив результат, т.е. решив свою задачу END CP, освобождает терминал, о чем свидетельствует флаг 4.
Следующий пример иллюстрирует уже применение языка МИКС для моделирования непрерывно-дискретной системы. Моделируемая система состоит из компрессора, уравнительного резервуара и четырех химических реакторов (рисунок ниже).
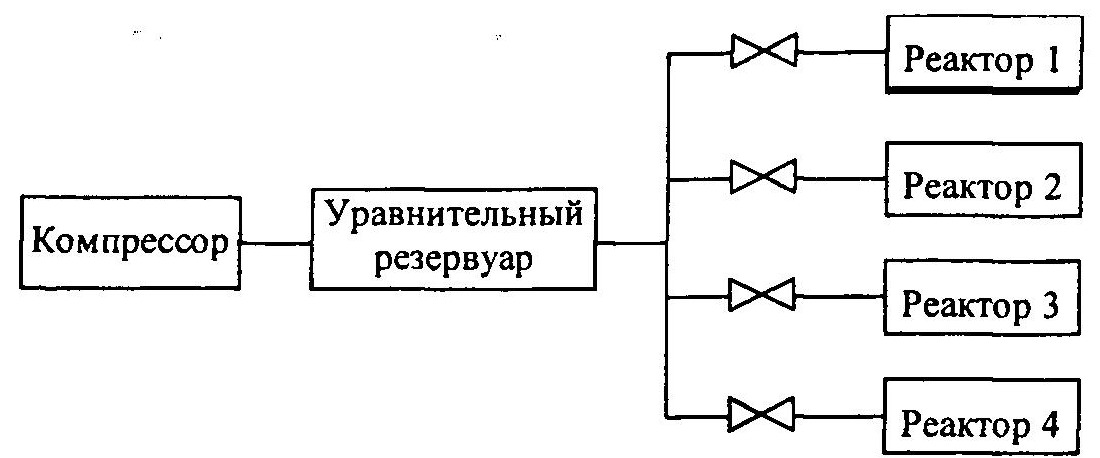
Реакторы могут быть запущены, остановлены или перезагружены независимо друг от друга. Компрессор с постоянной скоростью подает газ в уравнительный резервуар. Далее он поступает в реакторы через клапаны, обеспечивающие давление в каждом реакторе, равное минимальному из давлений в уравнительном резервуаре и критическому. Перед запуском каждый реактор загружается некоторым количеством реагента. В процессе химической реакции концентрация реагента экспоненциально уменьшается, если давление в уравнительном резервуаре остается выше критического. Когда концентрация реагента уменьшится до 10 % первоначальной, реактор останавливается на перезагрузку, время которой складывается из времени выгрузки продуктов реакции, очистки реактора и загрузки новой порции реагента
Рассматриваемая система может быть представлена в виде комбинированной модели (рисунок ниже).
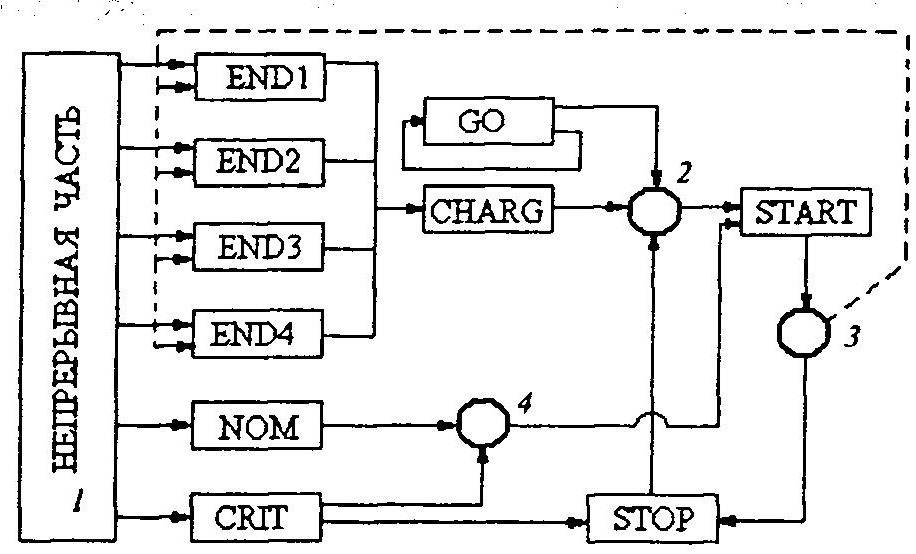
Непрерывная часть 1 описывается пятью дифференциальными уравнениями и на рисунке выделена в отдельный блок. Непрерывная часть определяет изменение концентрации реагента в реакторах и давление газа в уравнительном резервуаре.
Дискретная часть модели функционирует следующим образом. События END-i, i = 1,4 порождаются непрерывной частью. Они происходят, когда для какого-либо реактора концентрация реагента падает ниже 10 % начального уровня. При этом реактор исключается из набора работающих реакторов 3 и ставится на перезагрузку (процесс CHARG).
Когда концентрация реагента устанавливается на необходимом начальном уровне для данного реактора, реактор ставится в очередь 2 готовых к запуску. Если значение давления в уравнительном резервуаре выше номинального, то событие START включает реактор, при этом реактор переводится из набора 2 в набор 3 работающих реакторов.
Если давление в резервуаре падает ниже критического, то событие CRIT устанавливает флаг 4, запрещающий дальнейший запуск реакторов, а также вызывает событие STOP, с помощью которого останавливается последний запущенный реактор. При этом этот реактор переводится из набора 3 в набор 2 ожидающих запуска реакторов. Когда давление вновь превысит номинальное, событие NOM сбрасывает флаг 4, разрешая тем самым запуск очередного реактора.
Рекуррентное событие GO служит для начального запуска модели. С его помощью происходит включение реакторов с заданным интервалом, начиная с нулевого момента.
Все переменные и параметры модели, описывающие рассматриваемую систему, а также технологию моделирования интересующийся может прочесть в соответствующей литературе.
Процесс возникновения событий имеет стохастический характер. Важная задача — упорядочить события по времени их возникновения в системе. Для этого формируется информационная структура списка — календарь событий. Наличие подобного календаря позволяет обеспечить правильный учет системного времени. Ведение календаря и контроль за правильным ходом системного времени — функция специальной управляющей программы (монитора). В процессе имитации функционирования системы календарь постоянно обновляется: в него вносятся метки новых событий и исключаются имевшие место события.
Временная упорядоченность списка при этом сохраняется. При имитации подобных систем исследователь сталкивается с тремя различными типами времен:
• реальное, определяемое работой реальной системы и ходом обычных часов;
• системное (модельное), определяемое программой моделирования и имитирует ход часов реального времени;
• машинное, связанное с процедурой машинного счета имитационной программы.
Календарь событий в системе МИКС организуется с помощью набора. Возможны различные формы организации наборов в зависимости от упорядочения в них объектов:
• очереди (первый пришел — первый ушел),
• приоритетное упорядочение.
Если говорить о системах управления (АСУ ТП), то они должны работать в реальном масштабе времени, задаваемым объектом. Это значит, что скорость выдачи управляющих воздействий, формируемых системой управления должна быть согласована со скоростью протекания технологических процессов в управляемом объекте — управляющее воздействие не может быть выдано ни слишком рано, ни слишком поздно — и то, и другое приведет к нарушению хода процесса.
Системе управления требуется время на выработку управляющих воздействий — тау. Если процесс требует выработки воздействия через Т, то работа в реальном масштабе осуществляется при условии τ < Т. (Т — быстродействие объекта). Значит, очень важна производительность управляющих цифровых вычислительных устройств. Требование реального времени исполнения к соответствующим программным средствам является важнейшим. Близка к этой задаче и задача работы тренажеров для обучения операторов промышленных установок, пилотов, для пользователей, работающих с системами моделирования, с САПР, так как реакции ЭВМ на запросы должны быть психологически комфортными. Итак, для реализации эксперимента в реальном масштабе времени операционная система ЭВМ должна предоставить две принципиальные возможности: 1) развитые средства обмена с произвольными внешними устройствами через специальные устройства сопряжения; 2) средства синхронизации вычислительного процесса в реальном масштабе, т.е. синхронизацию модельного и реального времени с учетом времени выполнения программ. Практическая реализация способа синхронизации модельного времени осуществляется за счет использования контрольных точек, засекающих моменты начала и окончания работы программ, и измерения времени их работы с помощью программы-таймера, включенной в систему имитации. Таким образом, может быть проведено комплексное исследование взаимодействия программного и технического обеспечения систем реального времени. Все эти возможности реализованы в системе имитационного моделирования МИКС.